Vibration Threshold Policy: BEEKs CM v2
- Brad Hopkins
Overview
The Vibration Threshold Policy allows you to select a defined threshold level for a vibration metric to alert on. It works by looking at a past time history of vibration data (configurable), averaging over this period of time, and checking if the threshold level (configurable) is exceeded. A typical use of the policy might involve the application of published standards (ISO 10816/ 20816) for vibration levels of various machine classes, or custom thresholds based on specific knowledge of the asset to be monitored.
This policy can be used with BEEKs CM v2 beacons.
Getting Started
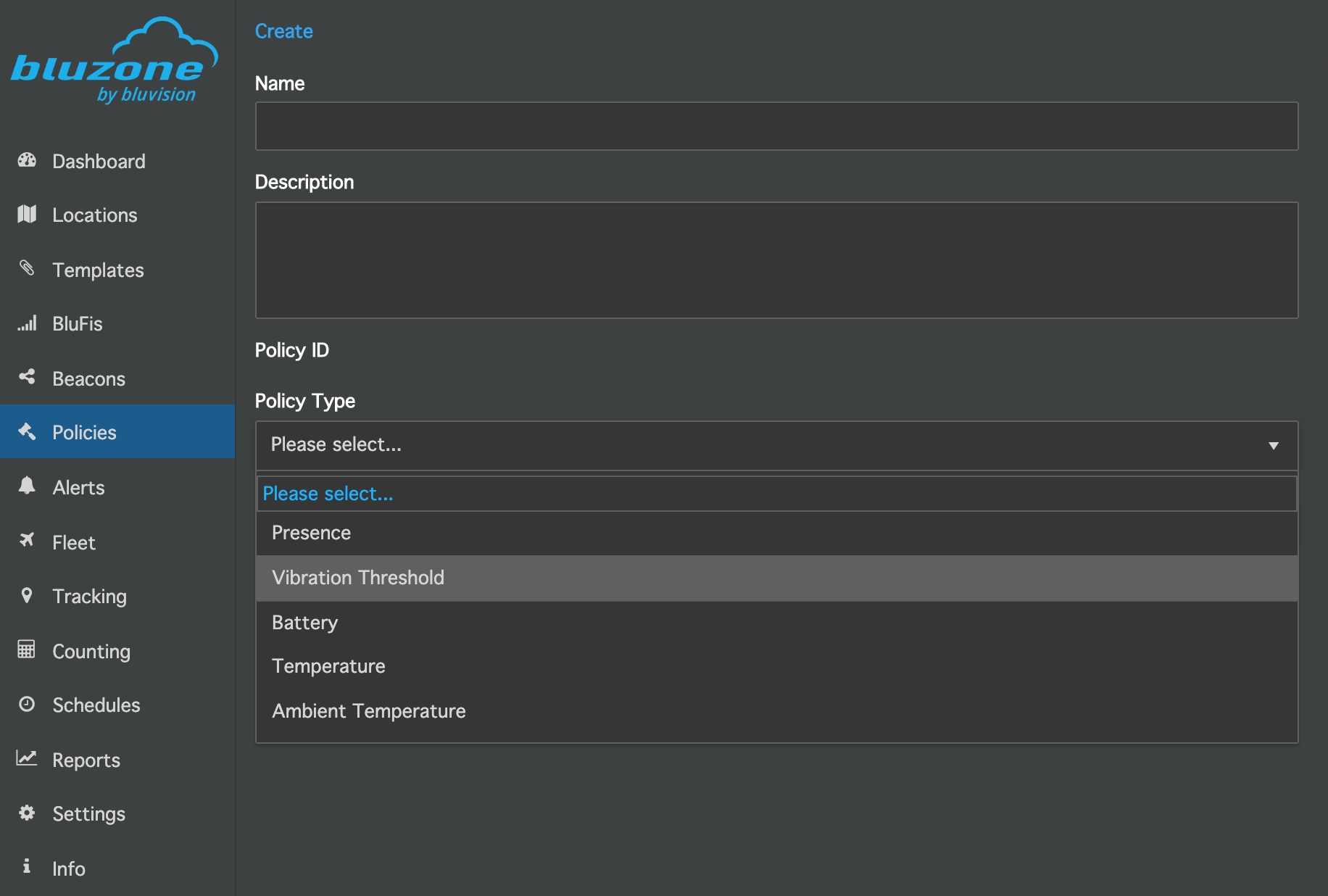
In Bluzone, select Policies > Create, then select 'Vibration Threshold' for the Policy Type. Keep in mind that you will need to create a separate policy for each Vibration Metric/ Threshold Level pair. For example, 0.6 in/s velocity RMS threshold would be one policy, and 5 g acceleration Peak-to-peak would be a separate policy. This is discussed more in the following sections.
Configuration
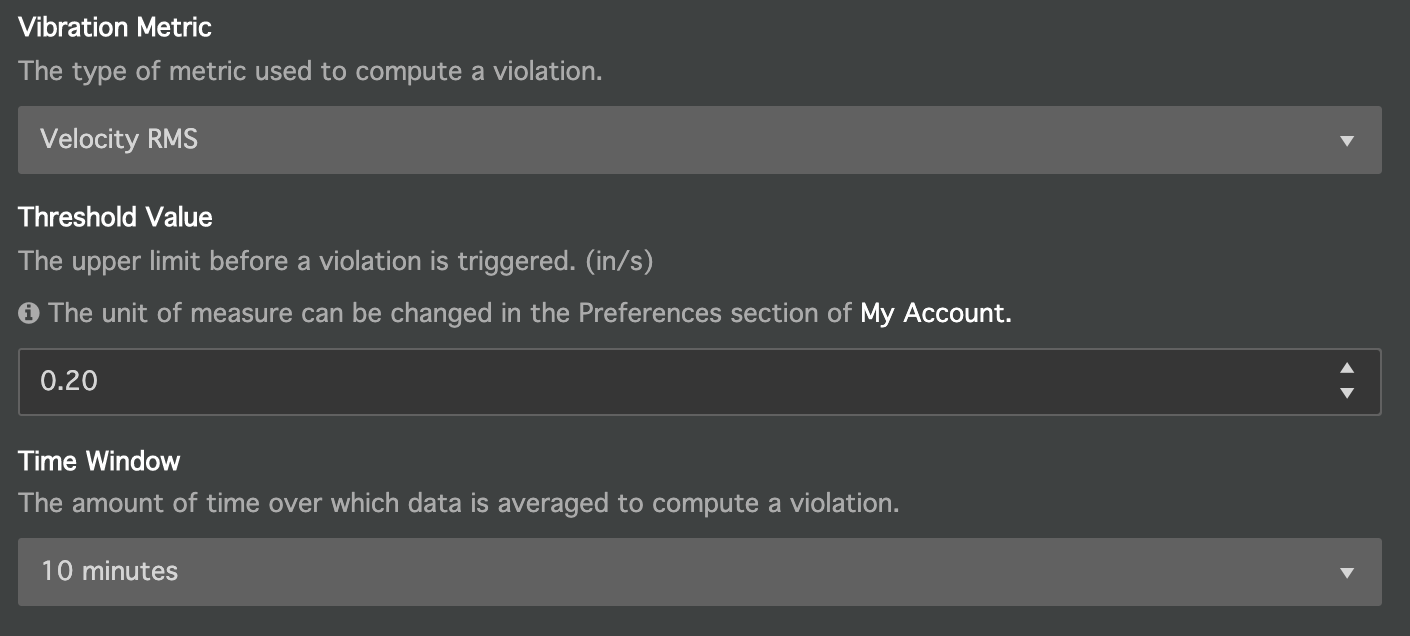
The Vibration Threshold Policy requires the configuration of three parameters: Vibration Metric, Threshold Value, and Time Window.
Vibration Metric
This is the vibration variable used for policy assessment. The Vibration Metrics supported are:
- Velocity RMS
- Velocity Peak-to-peak
- Acceleration RMS
- Acceleration Peak-to-peak
If a CM v2 beacon is configured with the default settings per the Installation Guide, then the beacon will automatically generate all four of these metrics approximately once every two minutes
Threshold Value
This is the numerical value of the vibration metric that must be exceeded in order to generate an alert. The value entered may be up to two decimal places, and will be in units of measure as indicated in the policy:

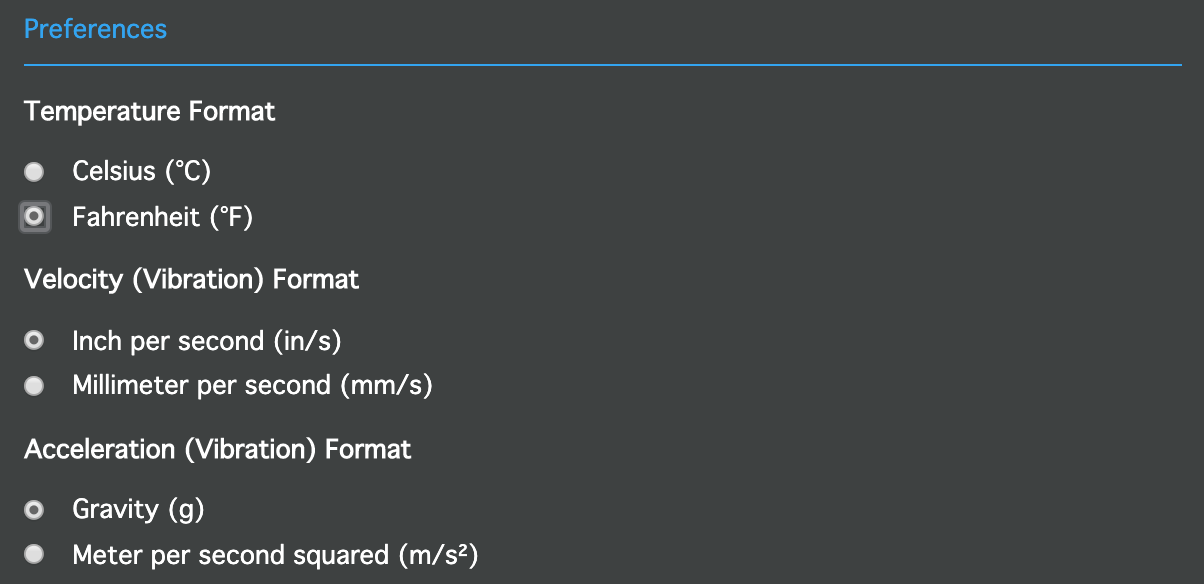
The unit of measure will reflect the selected Vibration Metric (velocity or acceleration). To change the unit of measure, click the 'My Account' link, then scroll down to the Preferences section:

The units of measure selected in the Preferences section of My Account will automatically be applied across the entire project, and will be reflected in the Vibration Threshold Policy, as well as the Statistics plots:
Time Window
This is the moving window of time over which to evaluate the past history of vibration data. All of the data in the time window will be averaged, and the averaged value will be compared to the Threshold Value. If the averaged value exceeds the Threshold Value, an alert will be generated. A value of 10, 20, 30, or 60 minutes may be selected.
Keep in mind that the default beacon configuration settings will produce new vibration data approximately once every two minutes, so if a Time Window of 10 minutes is selected, there will be about four to five data points used in this calculation, and about 29 to 30 data points would be used in the 60 minute calculation. A longer Time Window therefore requires a more sustained change in vibration level to generate an alert. As such, shorter windows lead to more sensitive (more responsive) alerting and longer windows lead to less sensitive (less responsive) alerting.
Adding Beacons
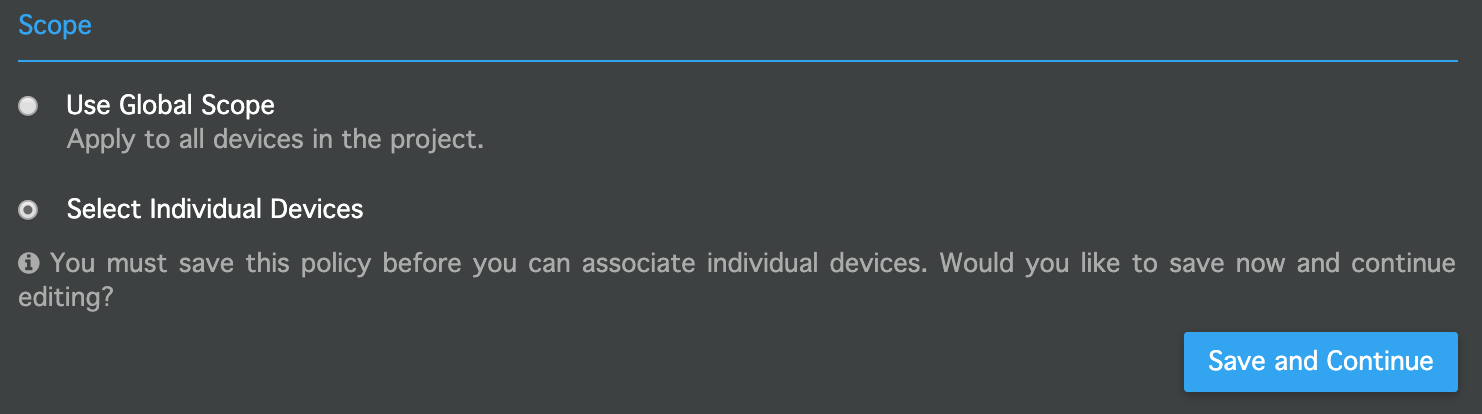
The beacons to which this policy applies are selected in the Scope section of the policy. To apply the policy to all BEEKs CM v2 on the project, choose 'Use Global Scope'. To select specific CM v2 beacons to apply the policy to, choose 'Select Individual Devices' then click the 'Save and Continue' button:
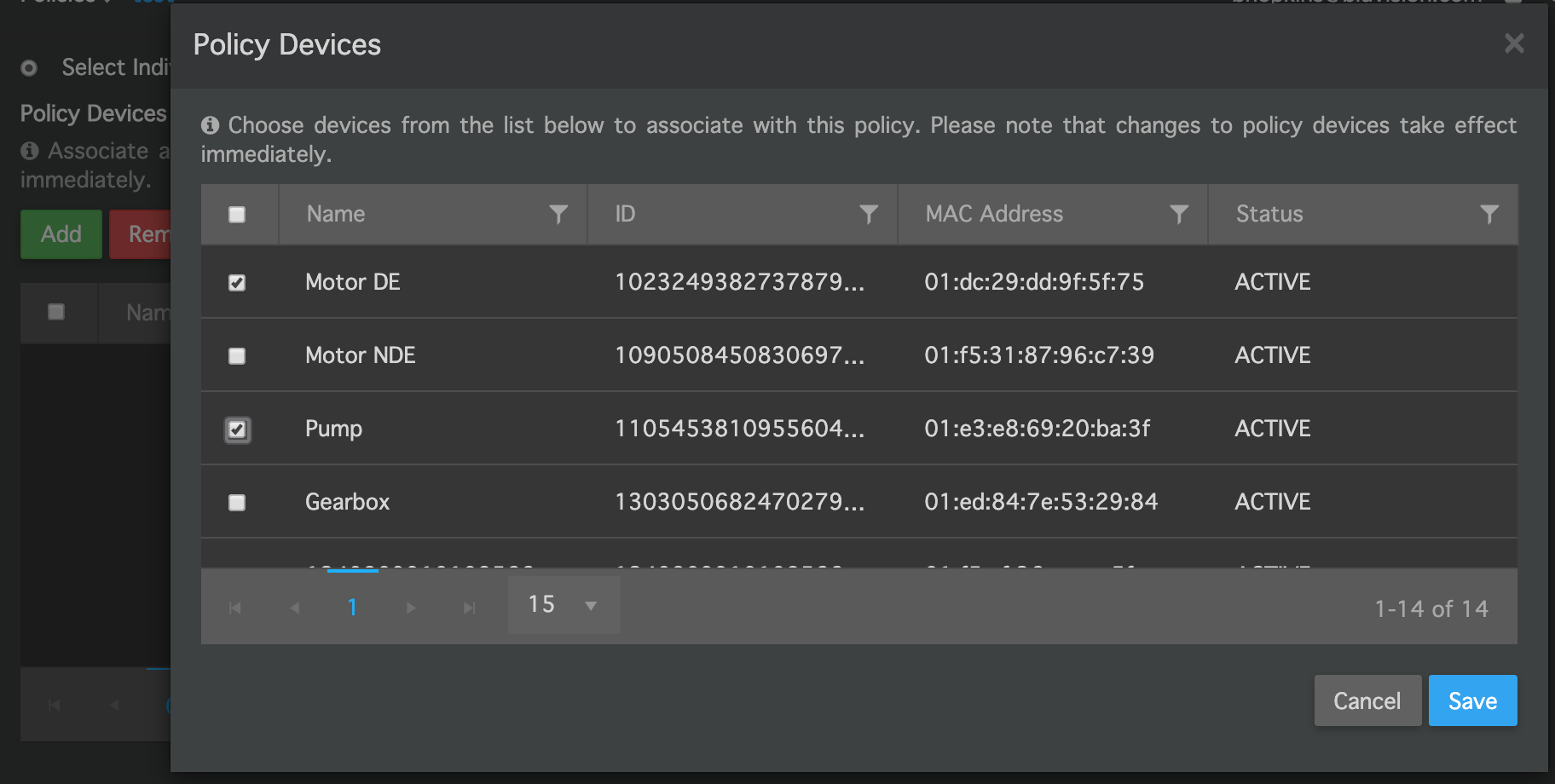
You may then select individual beacons to add to the policy, then click the 'Save' button:
Email Notifications
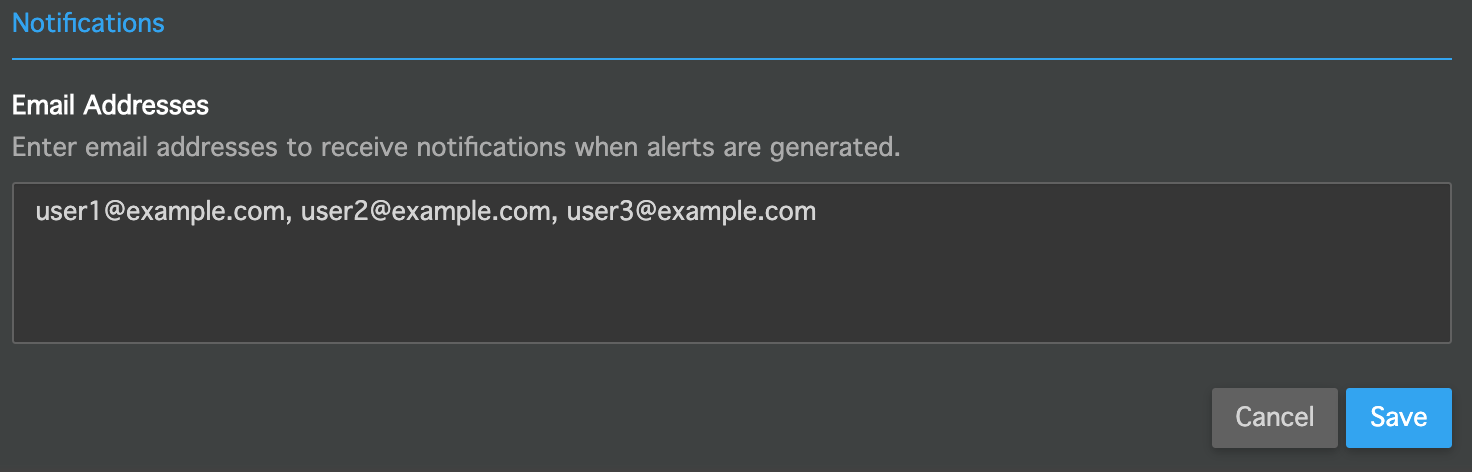
The Notifications section allows you to add email addresses to receive notifications when an alert has been generated. The email addresses should be separated with a comma:
By default, all email notifications are disabled for new projects, so email notifications will not be active until enabled. To enable email notifications, please request activation through a Jira ticket.
Saving Changes
Any time changes are applied to the policy, you must click the 'Save' button at the bottom of the screen in order for these changes to go into effect.
Additional Considerations
The most common use of this policy is the application of velocity RMS levels from published standards. Most notably, ISO 10816/20816 contain velocity RMS levels for different classes of rotating and reciprocating machinery. It should be noted that velocity RMS levels in these standards utilize an approximate bandwidth of 10 - 1000 Hz, per ISO 2954. The default configuration settings of the BEEKs CM v2 will produce velocity RMS values that align with this specification.
It should, however, be noted that these standards/ specifications assume low-noise instrumentation (like expensive lab-grade piezoelectric accelerometers). The BEEKs CM v2 utilizes a low-power MEMS accelerometer, which has a higher noise floor. This means that the velocity RMS values produced when the beacon is not excited (i.e., asset is not running) may fall within the range of designated "Unsatisfactory" levels for smaller machines. This should be taken into account when selecting threshold values.
Velocity RMS is commonly used indicate the presence of mid-frequency faults, like looseness, imbalance, and mis-alignment. Keep in mind that the vibration levels are sensitive to sensor placement, and care should be taken when using these values, per the instruction of the published standards. To help address uncertainty in relative vibration levels due to sensor placement, the Motion Condition Policy may be useful, as it establishes a baseline vibration level for the specific beacon placement on the asset, and alerts based on deviations from this baseline.
For acceleration-based metrics on the BEEKs CM v2, no specific standard is used to set the bandwidth. The default configuration settings will provide a bandwidth of approximately 2 Hz - 7500 Hz (+/- 25% error). This higher bandwidth is used since higher frequency faults like bearing defects and gear tooth defects typically manifest in higher-frequency acceleration-based metrics. Although the Vibration Threshold Policy may be used with Acceleration Peak-to-peak and Acceleration RMS, care should be taken in using these as there are no established/ published values to compare them to. It may, however, be suitable to set levels based on your own historical observation. For acceleration-based metrics, it is expected that better performance will be achieved using the Motion Condition Policy, which determines a unique baseline for the asset on which the beacon is installed and alerts when the vibration levels deviate significantly from this for a sustained period of time.