Basic Motion Policy: BEEKs CM and BEEKs Industrial
- Brad Hopkins
Overview
The Basic Motion Policy allows you to select criteria to define the motion of an asset. This policy is useful for creating alerts for motion or no-motion events for various assets, particularly rotating and reciprocating machinery like motors, pumps, compressors, and gearboxes.
The policy uses the beacon's motion (low-speed acceleration) data to create alerts. This data can be viewed for each beacon under Statistics > Charts and selecting the 'X-axis Motion' Metric (or alternatively, the Y or Z axis):
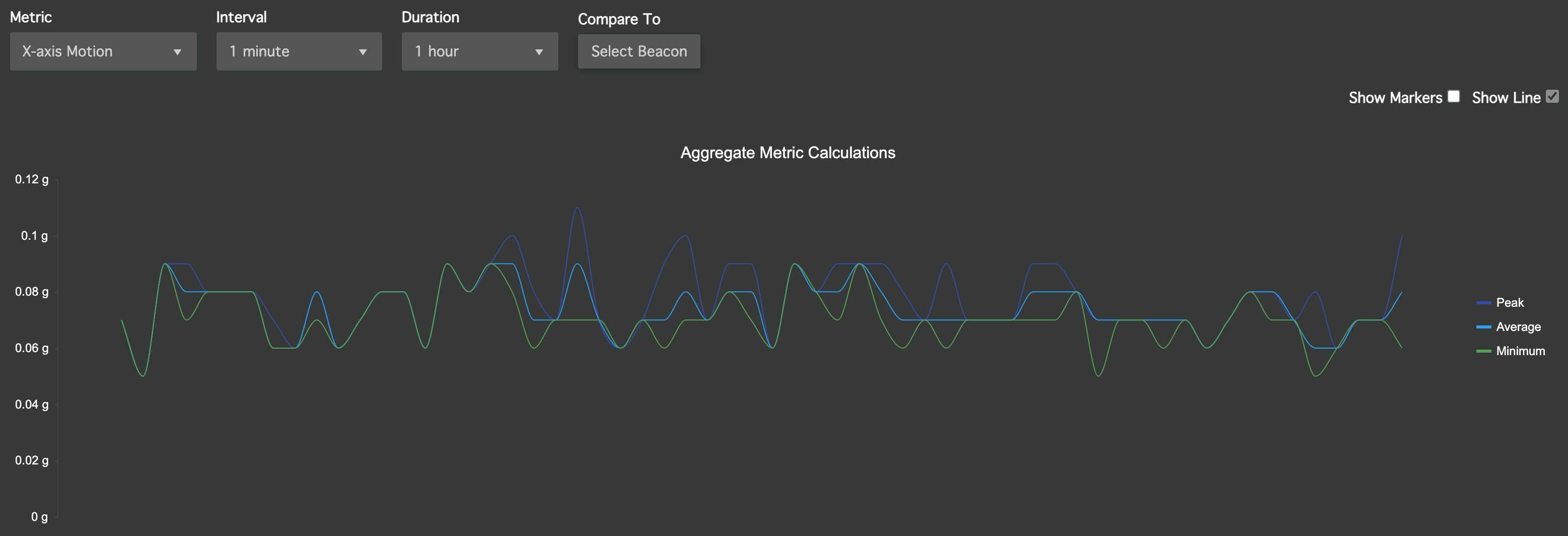
For more information on this data, please see Statistics Charts.
This policy can be used with BEEKs CM v2 beacons configured with "Default Beacon Template - Condition Monitoring AI" and/ or BEEKs Industrial beacons configured with "Default Beacon Template - Status Monitoring".
Getting Started
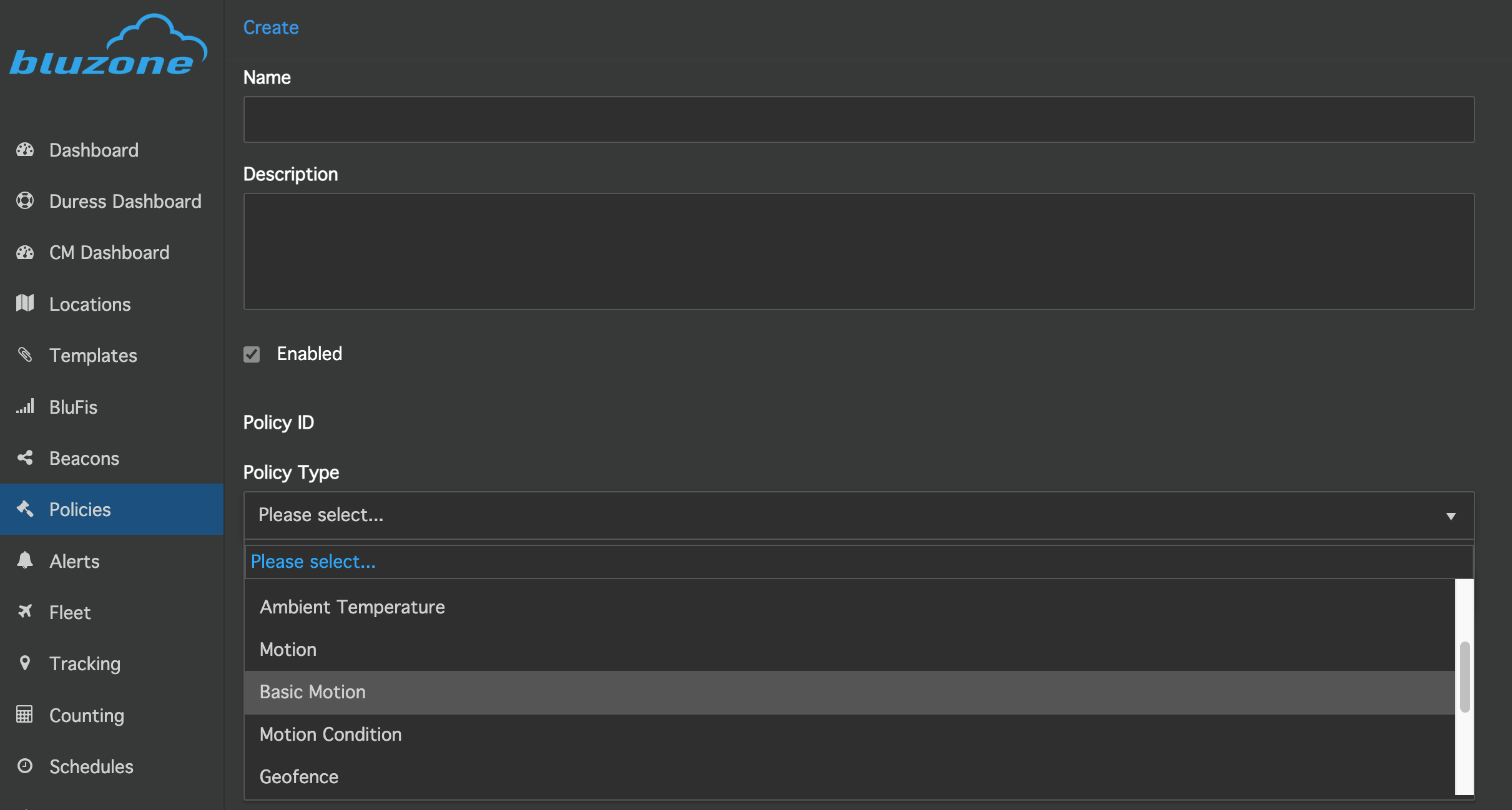
In Bluzone, select Policies > Create, then select 'Basic Motion' for the Policy Type.
Configuration
The Basic Motion Policy requires the configuration of six parameters: Violation Type, Violation State, Axis Type, Threshold, Duration, and Tolerance.
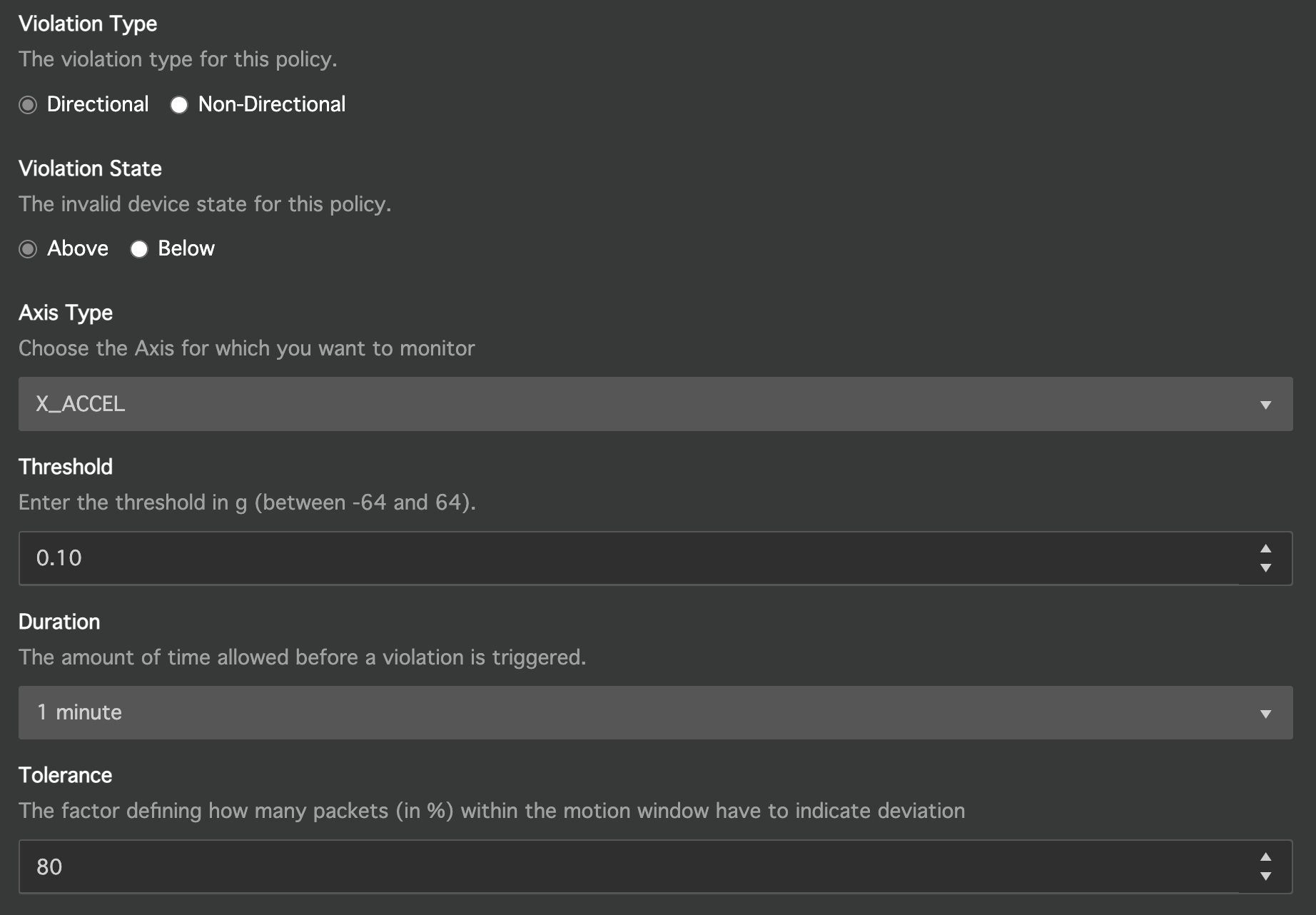
Violation Type
If you select Directional, alerts will be issued based on the specific direction (positive or negative, see Axis Type below) for the axis you are monitoring. This will allow you to set a motion threshold in positive or negative acceleration. For example, this would be used if you wanted to generate alerts only when the beacon acceleration goes above +2g. Alternatively, this could also be used to generate alerts when the beacon acceleration goes below -2g.
If you select Non-Directional, alerts will be issued based on the absolute value of the acceleration data, and both axis directions will be treated equally. For example, this would be used if you wanted to generate alerts when the magnitude of vibration exceeds 2g, meaning that a value greater than +2g or a value lower than -2g would both generate alerts. This is the recommended setting for monitoring the motion (on/ off state) of rotating and reciprocating machinery, in which the beacon constantly oscillates back and forth between positive and negative vibration directions.
Violation State
If you select Above, the policy will issue an alert if the acceleration level goes above the defined Threshold. This would normally be used to define a motion event if the Non-Directional Violation Type is selected.
If you select Below, the policy will issue an alert if the acceleration level goes below the defined Threshold. This would normally be used to define a no-motion event if the Non-Directional Violation Type is selected. This might also be used to define a motion event if the Directional Violation Type is selected, and motion is defined as being in the negative direction.
Axis Type
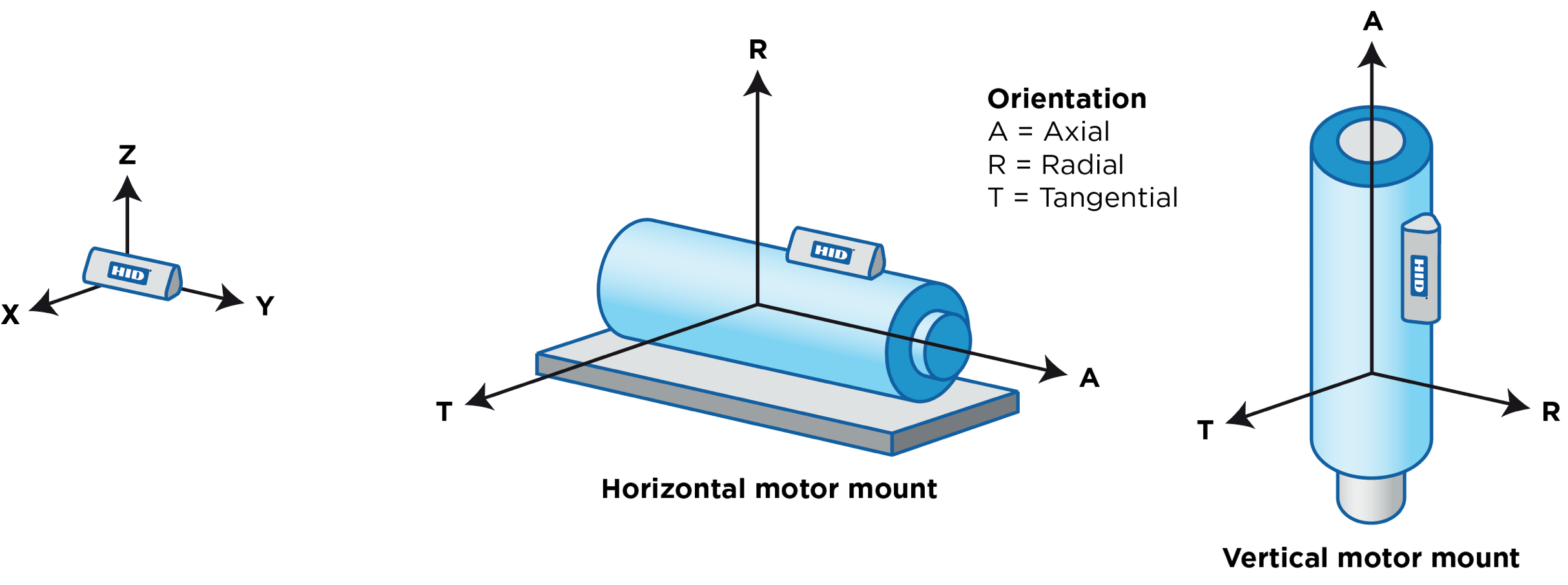
Select the beacon axis on which to alert. The beacon axes are shown below, with the direction of the X, Y, Z arrows indicating the direction of positive acceleration:
Threshold
This is the acceleration value (in g) on which a crossing will generate an alert. If the Directional Violation Type is selected, then a Threshold between -64 and 64 g may be entered (with 0.01 g resolution). If the Non-Directional Violation Type is selected, then a Threshold between 0 and 64 g may be entered (with 0.01 g resolution).
Duration
This is the amount of time (moving window) that is used to assess beacon data in order to generate an alert.
Tolerance
This is the percentage of data points within the Duration window that must cross the Threshold in order to generate an alert.
Adding Beacons
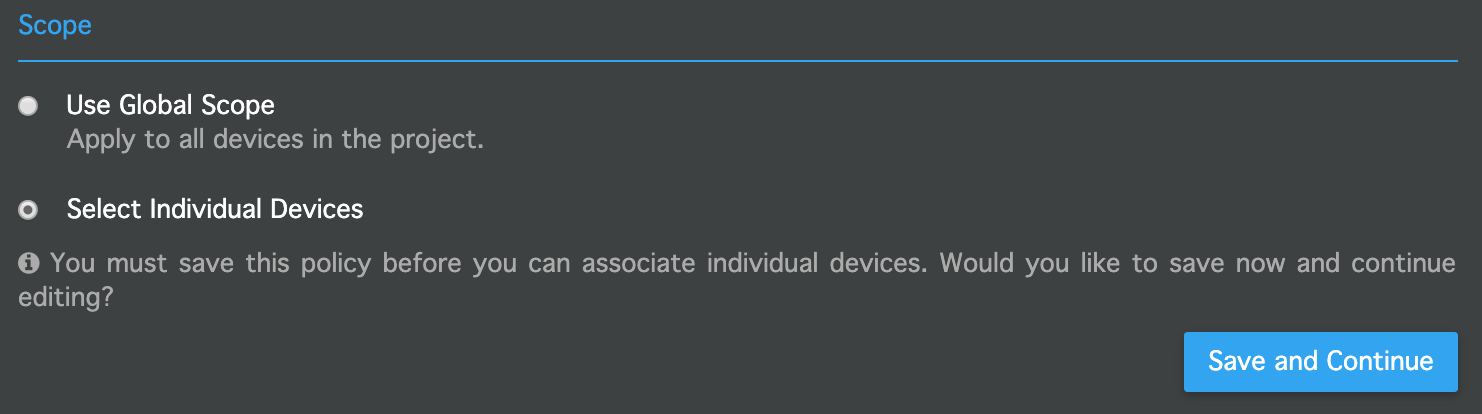
The beacons to which this policy applies are selected in the Scope section of the policy. To apply the policy to all BEEKs CM v2 and BEEKs Industrial on the project, choose 'Use Global Scope'. To select specific beacons to apply the policy to, choose 'Select Individual Devices' then click the 'Save and Continue' button:
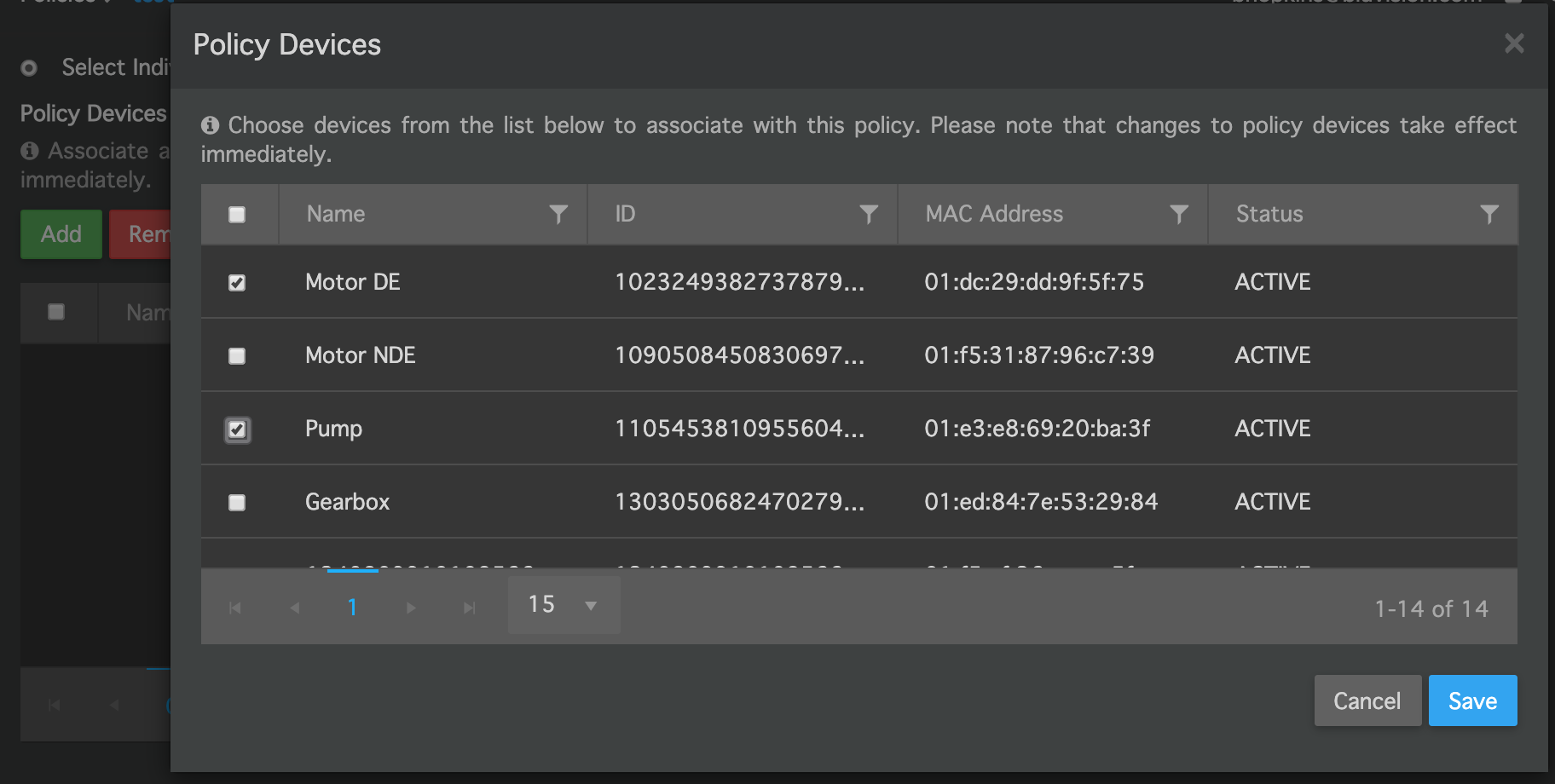
You may then select individual beacons to add to the policy, then click the 'Save' button:
Email Notifications
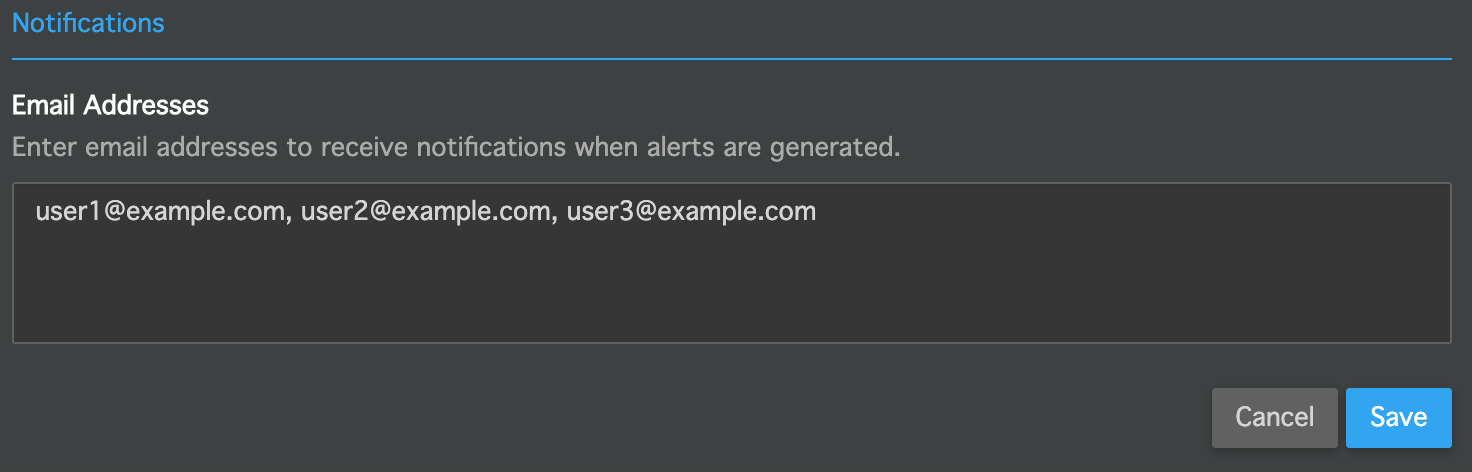
The Notifications section allows you to add email addresses to receive notifications when an alert has been generated. The email addresses should be separated with a comma:
By default, all email notifications are disabled for new projects, so email notifications will not be active until enabled. To enable email notifications, please request activation through a Jira ticket.
Saving Changes
Any time changes are applied to the policy, you must click the 'Save' button at the bottom of the screen in order for these changes to go into effect.
Additional Considerations and Examples
To use this policy to issue alerts for rotating or reciprocating machinery motion, the following settings are recommended:
| Parameter | Recommended Setting |
|---|---|
| Violation Type | Non-Directional |
| Violation State | Above |
| Axis Type | Axis should be selected based on the direction that will experience the highest vibration levels during motion events. In the example of the image shown in the "Axis Type" section above, it would be common to see high vibration levels in the motor tangential direction, which would coincide with the beacon X-axis. The Statistics Charts can also be viewed to help make this assessment. |
| Threshold | The Statistics Charts should be monitored to understand common vibration levels for motion and no-motion events, and the threshold should be set accordingly. |
| Duration | A value between 1 and 5 minutes is typically a good starting place. This parameter should be set to achieve the desired resolution and alert responsiveness for events. A smaller duration value will result in more responsive alerting and higher resolution for determining machine run time. |
| Tolerance | 80 is typically a good starting place, but may be adjusted if needed. A lower value will result in more responsive alerting. |