Motion Condition Policies
- Lutz Hennig
- Sarfraz Akram
Overview
The Motion Condition Policy uses an algorithm to learn the normal vibration behavior of the asset on which the beacon is installed. Each beacon added to the policy will learn it’s own unique model. The length of the learning period is determined based on the configuration settings.
After the learning period is complete, the policy will automatically go into deployment. In deployment, new data is evaluated against the learned model of normal vibration for each beacon. New data is tagged as “normal” if it falls within the bounds of the learned model and is tagged as “abnormal” if it falls outside the bounds of the learned model.
An alert will be generated if the ratio of abnormal values exceeds a threshold over a given period of time. This threshold and time period are configurable.
Training Configuration Settings
Training settings define the parameters that are used to train and generate the individual condition models of each beacon associated with a given policy.
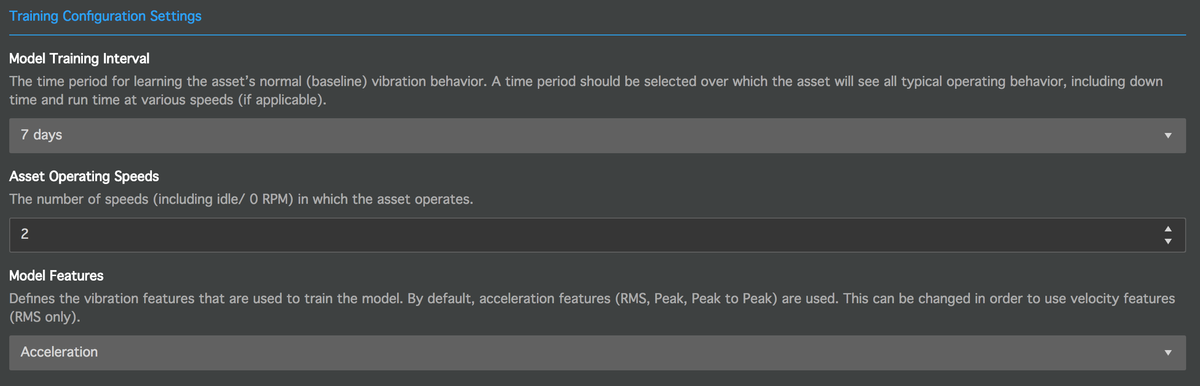
Model Training Interval
This is the time interval over which Bluzone will collect each policy beacon's feature data in order to generate their individual condition models.
By default we recommend a training interval no shorter than 7 days. In general the training interval should be long enough to capture all possible operating states and speeds that the beacon's asset can enter.
The vibration levels recorded during the training period are considered as the normal / healthy baseline for the given beacon and asset. All subsequent evaluation will be based on this baseline model.
Asset Operating Speeds
The number of different speeds that the given asset can operate in.
For example:
A value of 3 would indicate that a beacon is capable of running at 2 different speeds. The 3rd mode is reserved for an asset's idle / off state.
Model Features
Defines the features that are used to generate and evaluate a beacon's condition model. The currently available feature types are:
- Acceleration (Default, evaluates RMS, Peak, and Peak-to-Peak acceleration along 3 acceleration axes)
- Velocity (Beta feature, evaluates velocity RMS along 3 acceleration axes)
Note:
If you wish to change the feature type of an existing policy you will need to reset all previously completed condition models of that policy.
For each selected feature type you also need to make sure that all added beacons are configured to produce the appropriate features.
Evaluation Configuration Settings
Evaluation settings define the parameters that are used to determine whether or not currently produced beacon features are in violation of the previously created condition models. If such a violation state is detected, the policy will create an alert for the given beacon.
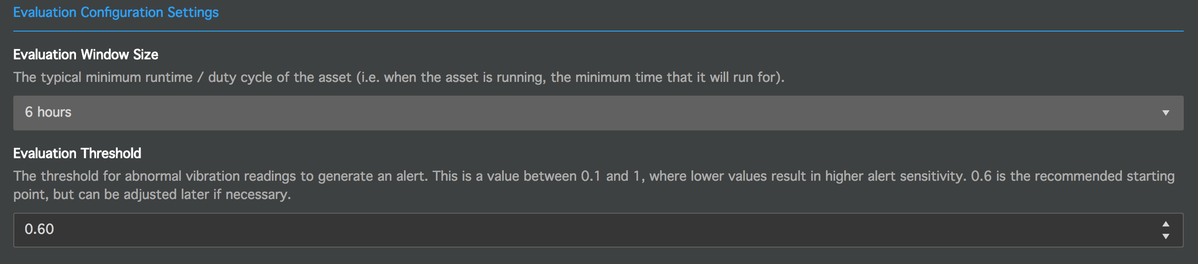
Evaluation Window Size
The evaluation of a Motion Condition policy collects a beacon's feature values over time. Each received packet will be tagged as either valid or invalid. An invalid packet is a packet that contains feature values outside of the bounds of the beacon's condition model.
Collected packets are stored in a rolling window with a size specified by this parameter.
For example:
With a window size of 6 hours, Bluzone will store all packets received within the last 6 hours. Out of the valid and invalid packets in this collection, Bluzone will calculate a ratio of invalid packets (e.g.: 33% of packets within the last 6 hours were invalid).
Evaluation Threshold
The percentage value that is used to compare the above mentioned ratio against.
For example:
With a threshold of 0.60 (i.e. 60%) and an invalid packet ratio of 33%, the policy will not create an alert for the given beacon.
If the threshold was lowered to 32%, the policy would create an alert for the beacon.