Default Condition Monitoring Templates
- Lutz Hennig
- Sarfraz Akram
Each Bluzone project comes with a number of default Beacon Templates that can help with provisioning a beacon for a certain purpose. If applied to a beacon, each of these templates will adjust the beacon with sensible default settings for the given use case.
The most common use cases are:
- Asset Tracking (RTLS / Proximity)
Appropriate templates are meant for use cases in which the position / indoor location of a beacon shall be tracked. - Condition Monitoring
Appropriate templates are meant for simple Condition Monitoring use cases like basic motion detection. These templates can not be used for advanced Condition Monitoring and Motion Condition policies. - Condition Monitoring using artificial intelligence
These are the appropriate templates for advanced Condition Monitoring and predictive maintenance. They will be covered in more detail below.
Default Acceleration Based Templates
This type of template is the recommended default when using advanced Condition Monitoring in Bluzone. It will configure beacons to produce the appropriate features to use with Motion Condition Policies that are configured to use Acceleration features.
Each Bluzone project contains one system template of this type for each device type that supports advanced Condition Monitoring. These templates share a common naming scheme that allows the end user to easily spot the correct template for their use case.
If you wish to configure your beacons for advanced Condition Monitoring, please select a template with the following naming scheme:
- Default <Device Type> Template - Condition Monitoring AI
Please see examples of the resulting full template names in the screenshot below:
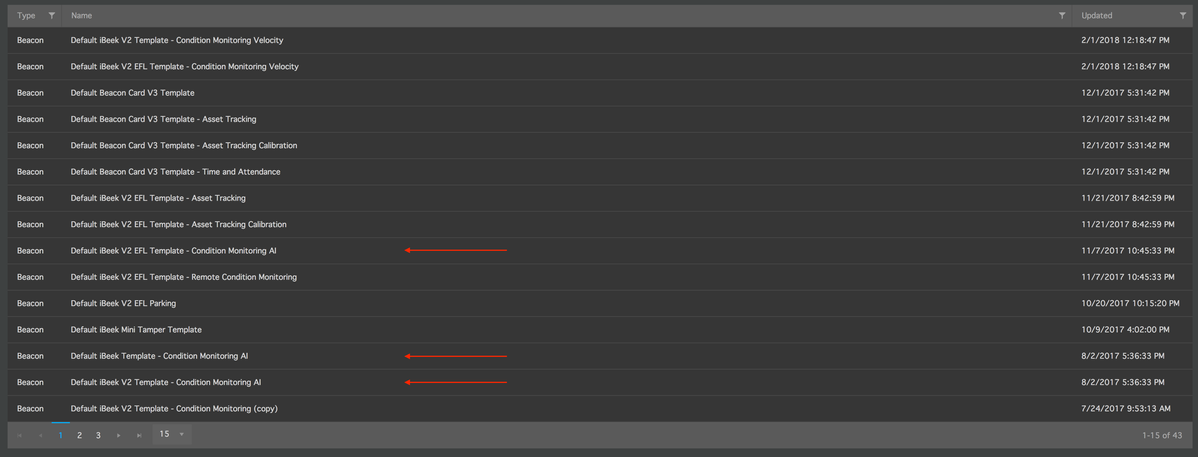
Once configured with such a template, a beacon will start producing the following features in both its Low Speed mode and its High Speed mode:
- RMS (Root Mean Square) acceleration on X-, Y- and Z-Axes
- Peak acceleration on X-, Y- and Z-Axes
- Peak-to-Peak acceleration on X-, Y- and Z-Axes
A full data production cycle of the beacon will take about 140 seconds. During this time the beacon will ...
- ... remain in Low Speed mode for 120 seconds in order to collect a total of 4 Low Speed data points (12.5Hz, 375 samples) per feature
- ... remain in High Speed mode for 20 seconds in order to collect a total of 2 High Speed data points (800Hz, 8000 samples) per feature
The result of such a full cycle will be 6 data points - each of them containing the 3 features mentioned above.
Default Velocity Based Templates
This type of template is one of Bluzone's current Beta features. It will configure beacons to produce a mix of acceleration and velocity based features to use with Motion Condition Policies that are configured to use Velocity features.
Each Bluzone project contains one system template of this type for each device type that supports advanced Condition Monitoring and velocity production. These templates share a common naming scheme that allows the end user to easily spot the correct template for their use case.
If you wish to configure your beacons for advanced Condition Monitoring, please select a template with the following naming scheme:
- Default <Device Type> Template - Condition Monitoring Velocity
Please see examples of the resulting full template names in the screenshot below:
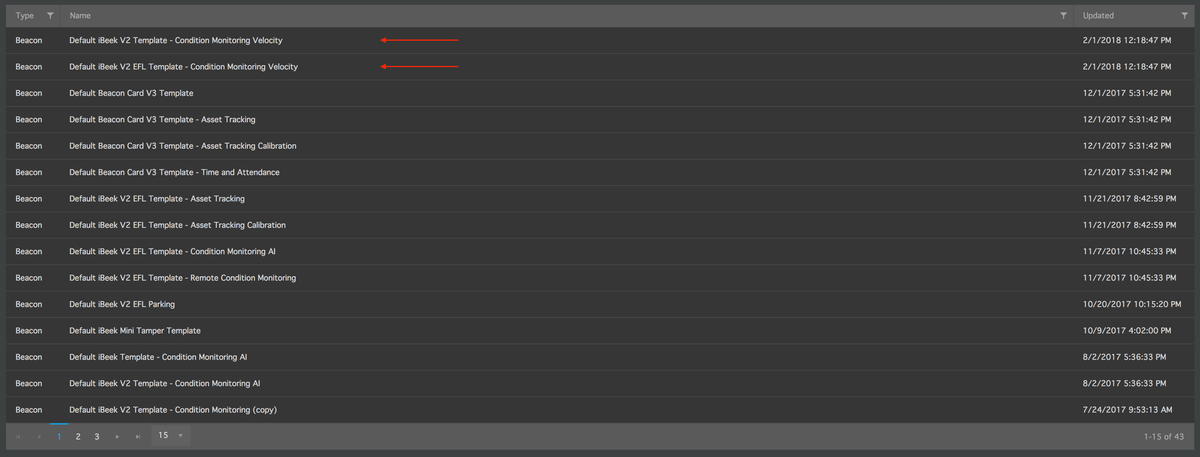
Once configured with such a template, a beacon will start producing the following features in its Low Speed mode and its High Speed mode:
- Low Speed only: RMS (Root Mean Square) acceleration on X-, Y- and Z-Axes
- Low Speed only: Peak acceleration on X-, Y- and Z-Axes
- Low Speed only: Peak-to-Peak acceleration on X-, Y- and Z-Axes
- High Speed only: RMS (Root Mean Square) velocity on X-, Y- and Z-Axes
- High Speed only: Peak-to-Peak velocity on X-, Y- and Z-Axes
A full data production cycle of the beacon will take about 100 seconds. During this time the beacon will ...
- ... remain in Low Speed mode for 90 seconds in order to collect a total of 3 Low Speed data points (12.5Hz, 375 samples) per feature
- ... remain in High Speed mode for 10 seconds in order to collect a total of 1 High Speed data points (800Hz, 8000 samples) per feature
The result of such a full cycle will be 4 data points. The High Speed data point will contain the above mentioned 2 velocity features while the Low Speed data point will contain the 3 acceleration features.